Autonomous robotic vehicles

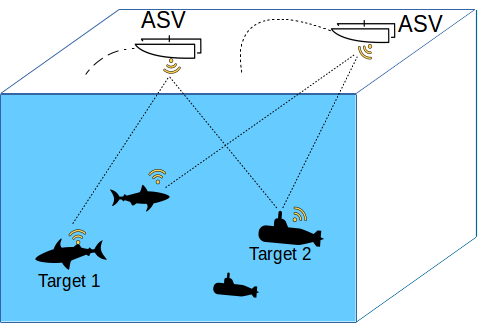
My research tackles problems involving motion planing, control, and estimation of networked multi-agent systems. Each agent can be a mobile ground robot, an autonomous aerial/marine vehicle (AUV), or simply, a sensor node. Applications include formation control of multiple autonomous vehicles, cooperative target localization and pursuit, synchronization of networked multiple autonomous vehicles, etc. The solutions proposed possess the following properties:
Some the algorithms developed have been tested successfully with real ground and marine robotic vehicles and described in the following pages.