
Simultaneous target localization and pursuit
Cooperative simultaneous target localization and pursuit (cooperative SLAP) is a problem defined for one or multiple autonomous robots/vehicles acting as mobile sensors to find the state of unknown moving target using some sort of information measured about the target. The state of the target typically includes the target’s position, velocity, and even possibly acceleration, depending on the model of the target adopted. The information about the target can be ranges, bearings, or both, depending on sensing capability of the robots.
Contributions
We propose a two approaches to the range-based SLAP problems:
- A centralized approach using MPC and Baysian Cramer Rao Lower Bound.
- A distributed approach using tools from nonlinear control, distributed control, and distributed estimation.
Videos - an example using an autonomous vehicle to localize and pursue a target simultaneously using the MPC scheme in [Paper]
Videos - an example using three robots to localize and pursue a moving target [Paper]
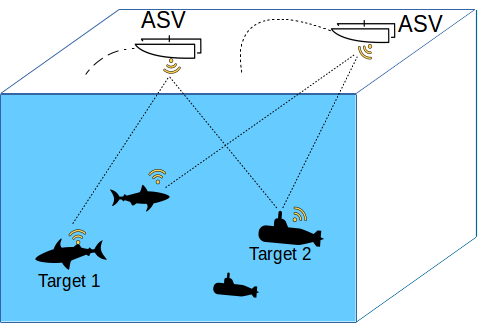
Experimental results (2023) - an example using 2 robots to localize and pursue an underwater target [Paper]
Experimental setup:
- Robots: Medusa-class autonomous marine robots, developed by IST Lisbon.
- Software components: Linux, ROS (C++, Python).
- Navigation: GPS, DLV, AHRS.
- Vehicle communication network: wifi (UDP protocol).
- Information to the target: ranges, measured by acoustic modems, provided by Evologics company.
Experimental results (2021) - an example using 2 robots to localize and pursue a target [Paper]
Related publications
- Nguyen Hung, Eduardo Cunha, Francisco Branco, Antonio Pascoal, “Target localization and pursuit with networked robotic vehicles: theory, simulation, and experiments”, Journal of Field Robotics, 2024.
[Preprint] - [Web] - [Code] - [Video]. - Nguyen T. Hung, Francisco Rego, Antonio M. Pascoal, “Cooperative distributed estimation and control of multiple autonomous vehicles for range-based underwater target localization and pursuit”, IEEE Transactions on Control System and Technology.
[Preprint] - [Web] - [Code] - [Video]. - Nguyen T. Hung, N. Crasta, David Moreno-Salinas, António M. Pascoal, Tor A. Johansen, “Range-based target localization and pursuit with autonomous vehicles: An approach using posterior CRLB and model predictive control”, Robotics and Autonomous Systems, 2020.
[Preprint] - [Web] - [Code] - [Videos]. - Nguyen T. Hung, Antonio M. Pascoal, “Range-based navigation and target localization: observability analysis and guidelines for motion planning”, IFAC2020, to appear.
[Preprint] - [Web].