
Cooperative path following of multiple autonomous vehicles
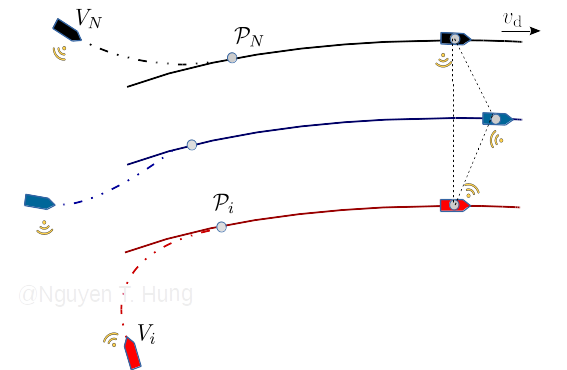
Cooperative path following (CPF) is a typical formation control problem, defined as steering a group of autonomous robotic vehicles along given spatial paths while holding a desired inter-vehicle formation pattern. An example of CPF is illustrated in the figure below. In this setup, each vehicle is dedicated with a local task, i.e. converge to and follow its pre-assigned path, while cooperating with other vehicles via a wireless communication network to position itself relative to other vehicles such that all vehicles are aligned in a triangular formation in time.
Although many path following methods have been developed over the last decade, the main challenge is how to handle constraints on the vehicles (e.g. limit on linear and angular velocities) and the constraints on the network topology and save the communication bandwidth.
Contribution
We proposed a solution that involves in decoupling the original CPF problem into two sub-problems: i) single path following of input-constrained vehicles and ii) coordination of an input-constrained multi-agent system (MAS). The first is solved by adopting a sampled-data model predictive control (MPC) scheme, whereas the latter is tackled using a novel distributed control law with an event-triggered communication mechanism. The proposed strategy yields a closed-loop CPF system that is input-to-state-stable (ISS) with respect to the system’s state (consisting of the path following error of all vehicles and their coordination errors) and the system’s input, which includes triggering thresholds for ETC communications and communication delays.
Videos - an example of circular formation with MPC-CPF [Paper]
Videos - real trial CPF with multiple marine autonomous vehicles [Paper]
Experimental setup:
- Robots: Medusa marine robots, developed by IST Lisbon.
- Software components: Linux, ROS (C++, Python).
- Navigation: GPS, DLV, AHRS.
- Vehicle communication network: wifi (UDP protocol).
Related publications
Nguyen T. Hung, Antonio M. Pascoal, Tor A. Johansen, “Cooperative path following of constrained autonomous vehicles with model predictive control and event-triggered communications”, International Journal of Robust Nonlinear Control, 2020.
[Preprint] - [Web] - [Code] - [Videos]- Francisco C. Rego, Nguyen T. Hung, Colin N. Jones, Antonio M. Pascoal and A. Pedro Aguiar, Chapter 8: “Cooperative Path- Following Control with Logic-Based Communications: Theory and Practice”, Navigation and Control of Autonomous Marine Vehicles, IET books, 2019. [Preprint] - [Web] - [Code] - [Videos].
Nguyen T. Hung, Antonio Pascoal, “Cooperative Path Following of Autonomous Vehicles with Model Predictive Control and Event Triggered Communications”, 6th IFAC Conference on Nonlinear Model Predictive Control, Wisconsin, USA, 2018. [Web].
- Francisco C. Rego, Nguyen T. Hung, Antonio Pascoal, “Cooperative Path Following of Autonomous Marine Vehicles: Theory and Experiments”, IEEE OES Autonomous Underwater Vehicle, Porto, Portugal, 2018.
[Web] - Nguyen T. Hung, F. Rego, N. Crasta, Antonio Pascoal, “Input-Constrained Path Following for Autonomous Marine Vehicles with a Global Region of Attraction”, The 11th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles–CAMS 2018, Opatija, Croatia. [Web].