
Autonomous robotic vehicles
Path following control
- A study on path following control methods for autonomous robotic vehicles, covering a wide variety techniques based on Lyapunov stability theory or optimization based techniques such as Nonlinear Model Predictive Control
- Simulation toolboxes testing path following methods
- Experience shared with field trials with several types of marine robots
Videos - path following toolbox with Matlab link
Videos - path following toolbox with ROS/Gazebo link
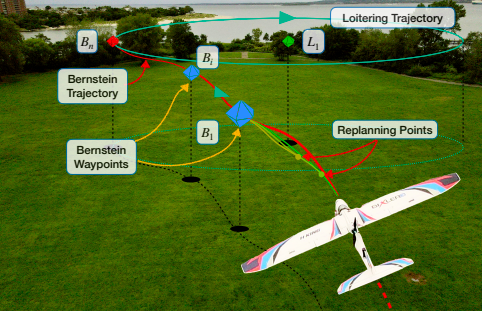
Trajectory planning and control for fixed-wing UAV (in collaboration with ARPL lab at New York University)
Related publications
- Nguyen Hung, Francisco Rego, Joao Quintas, Joao Cruz, Marcelo Jacinto, David Souto, Andre Potes, Luis Sebastiao, Antonio Pascoal, “A review of path following control strategies for autonomous robotic vehicles: theory, simulations, and experiments”, 2022, Journal of Field Robotics, https://doi.org/10.1002/rob.22142.
[Preprint] - [Web] - [Code] - [Video]. - Luca Morando, Sanket Ankush Salunkhe, Nishanth Bobbili, Jeffrey Mao, Luca Masci, Cristino De Souza Jr., Nguyen Hung, Giuseppe Loianno, “Trajectory Planning and Control for Differentially Flat Fixed-Wing Aerial Systems, ICRA 2025 [video]-[paper]